Os vetores são segmentos de reta responsáveis por caracterizar grandezas físicas vetoriais, tais como força, velocidade, aceleração e distância. Tratam dos módulos, dados pelo seu tamanho, e das suas orientações, dadas pela sua direção e sentido. Os vetores podem ser classificados em iguais, nulos, perpendiculares, oblíquos, opostos, unitários e resultantes.
Os vetores são caracterizados pelo seu módulo, direção e sentido.
O vetor resultante é o vetor que resulta das operações vetoriais.
As operações com vetores envolvem suas adições, subtrações e multiplicações por um número real.
Os vetores perpendiculares são calculados por meio do teorema de Pitágoras.
Os vetores oblíquos são calculados por meio da lei dos cossenos e orientados pela regra do paralelogramo.
Os vetores podem ser decompostos na sua componente horizontal em x e na sua componente vertical em y.
Videoaula sobre vetores
Características dos vetores
Os vetores são representados por uma letra com uma seta acima — por exemplo, \(\vec{v}\), \(\vec{s}\) e \(\vec{a}\) — e caracterizados pelo seu módulo e orientação, dados pela sua direção e sentido.
Módulo de um vetor
O módulo, comumentemente chamado de intensidade ou valor numérico, diz respeito ao tamanho da grandeza vetorial, sendo representado por \(|\vec{v} |\) ou apenas v.
Direção de um vetor
A direção informa a posição do vetor, podendo ser horizontal, vertical e diagonal.
Sentido de um vetor
O sentido informa a posição na qual a ponta do vetor está apontando, podendo ser direita, esquerda, para cima, para baixo, leste, norte, sul, oeste, nordeste, noroeste, sudeste, sudoeste etc.
Não pare agora... Tem mais depois da publicidade ;)
Tipos de vetores
Os vetores podem ser tipificados como vetores iguais, vetores nulos, vetores opostos e vetores unitários.
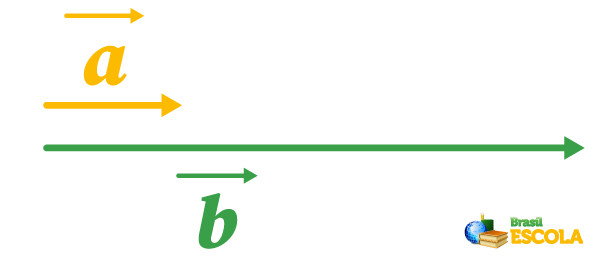
Vetores iguais
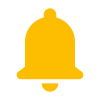
Os vetores iguais são aqueles que apresentam a mesma direção, sentido e módulo, como podemos ver na imagem abaixo:
O vetor \(\vec{a}\) é igual ao vetor \(\vec{b}\).
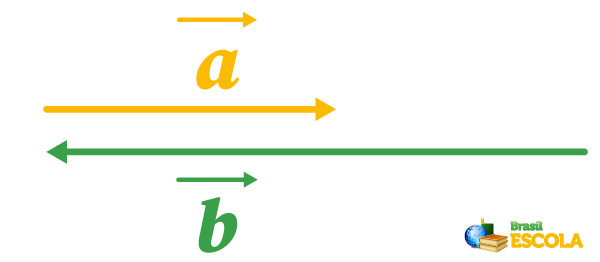
Vetores opostos
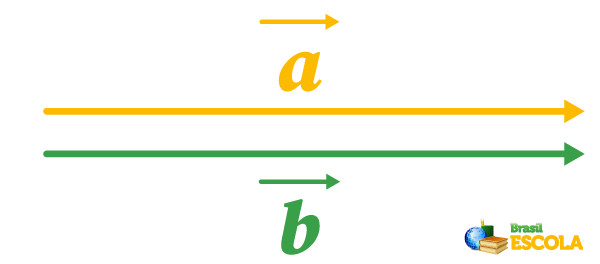
Os vetores opostos são aqueles que apresentam sentidos opostos, sendo representados por um sinal negativo na frente do símbolo do vetor.
O vetor \(-\vec{a}\) é o vetor oposto de \(\vec{a}\).
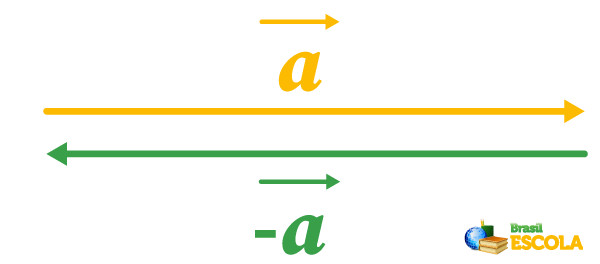
Vetores perpendiculares
Os vetores perpendiculares são a combinação entre vetores com direções opostas que formam um ângulo de 90°.
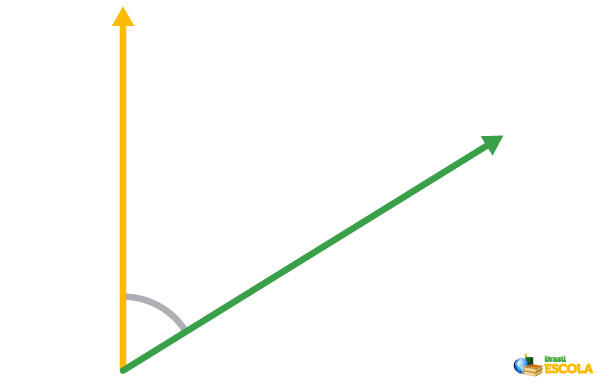
Vetores oblíquos
Os vetores oblíquos são a combinação entre vetores com direções opostas que formam um ângulo diferente de 0°, 90° e 180°.
Vetores nulos
Os vetores nulos são aqueles que apresentam módulo igual a zero e direção e sentido indeterminados. São representados geometricamente por apenas um ponto e escrito como\(\vec{0}\).
Vetores unitários
Os vetores unitários são aqueles que apresentam módulo igual a 1.
Vetores resultantes
O vetor resultante é aquele que resulta das operações com vetores. Para determiná-lo com exatidão, é essencial levar em consideração o módulo, direção e sentido dos vetores utilizados na operação vetorial.
As operações com vetores são operações algébricas realizadas por meio do módulo, direção e sentido dos vetores, sendo elas descritas abaixo:
Adição de vetores
A adição de vetores é o somatório dos módulos (ou tamanhos) e sentidos dos vetores que obrigatoriamente estão no mesmo sentido e direção.
Exemplo: Determine o vetor resultante da adição dos vetores \(\vec{a}\) e \(\vec{b}\), com tamanho de 1 unidade e de 4 unidades, respectivamente, com suas orientações descritas na imagem abaixo:
O vetor resultante da adição dos vetores \(\vec{a}\) e \(\vec{b}\) possui direção horizontal e sentido para a direita. Já seu tamanho é calculado por meio do somatório dos tamanhos dos vetores \(\vec{a}\) e \(\vec{b}\):
\(vetor\ resultante= \vec{a}+ \vec{b}\)
\(vetor\ resultante= 1+4\)
\(vetor\ resultante=5 u\)
A direção do vetor resultante é horizontal, o sentido do vetor resultante é para a direita e o tamanho do vetor resultante é de 5 unidades.
Subtração de vetores
A subtração de vetores é a diferença dos módulos (ou tamanhos) e sentidos dos vetores. Eles precisam, obrigatoriamente, ter a mesma direção e sentido oposto.
Exemplo: Determine o vetor resultante da subtração dos vetores \(\vec{a}\) e \(\vec{b}\), com tamanhos de 2 unidades e de 3 unidades, respectivamente, com suas orientações descritas na imagem abaixo:
O vetor resultante da subtração dos vetores \(\vec{a}\) e \(\vec{b}\) possui direção horizontal e sentido para a esquerda, sendo no mesmo sentido que o vetor com maior tamanho. Já seu tamanho é calculado por meio da subtração dos tamanhos dos vetores \(\vec{a}\) e \(\vec{b}\):
\(vetor\ resultante= \vec{a}- \vec{b}\)
\(vetor\ resultante=2-3\)
\(vetor\ resultante=-1\ u\)
A direção do vetor resultante é horizontal, o sentido do vetor resultante é para a esquerda, e o tamanho do vetor resultante é de 1 unidade. O sinal negativo significa que ele está contrário ao sentido do vetor \(\vec{a}\).
Produto de um número real por um vetor
O produto de um número real por um vetor gera um vetor novo, com mesma direção e sentido para o caso de o número real ser positivo e mesma direção e sentido oposto para o caso de o número real ser negativo. Seu módulo é o resultado do produto entre o número real n e o vetor \(\vec{v}\), conforme descrito na fórmula abaixo:
\(v_{novo}=n\cdot \vec{v}\)
Exemplo: Determine o vetor resultante da multiplicação do número real 10 pelo vetor \(\vec{a}\) com módulo de 15 unidades e orientação sudoeste.
Nesse caso, a direção e o sentido do vetor permanecem os mesmos — diagonal e sudoeste, respectivamente. Já o módulo é calculado por meio da fórmula abaixo:
\(v_{novo}=n\cdot \vec{v}\)
\(v_{novo}=10\cdot 15\)
\(v_{novo}=150\ u\)
A direção do vetor resultante é diagonal, o sentido do vetor resultante é sudoeste, e o módulo do vetor novo é de 150 unidades.
Vetores perpendicualres: regra do paralelogramo e o teorema de Pitágoras
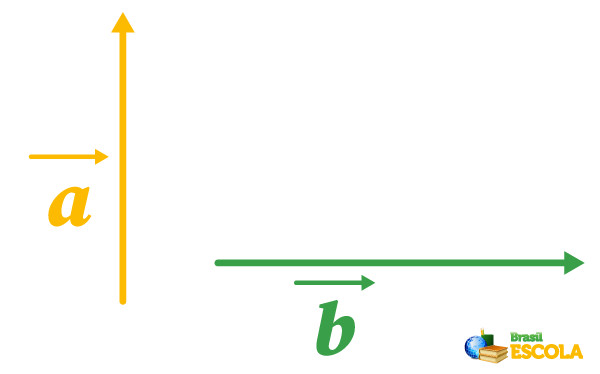
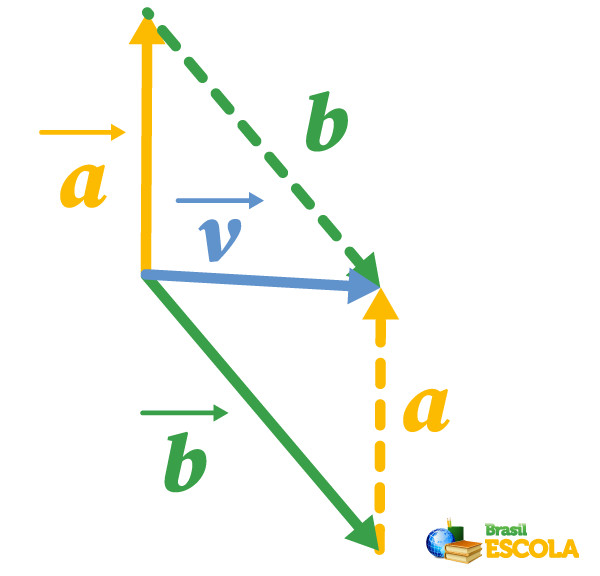
Exemplo: Determine o vetor resultante da combinação dos vetores \(\vec{a}\) e \(\vec{b}\), com tamanhos de 3 unidades e de 5 unidades, respectivamente, e com suas orientações descritas na imagem abaixo:
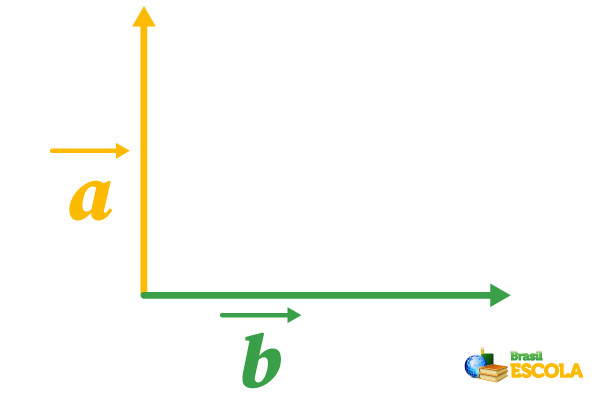
Para encontrarmos sua direção e sentido, usaremos a regra do paralelogramo, que consiste primeiramente em unir os dois vetores pela sua origem, conforme desenhado abaixo:
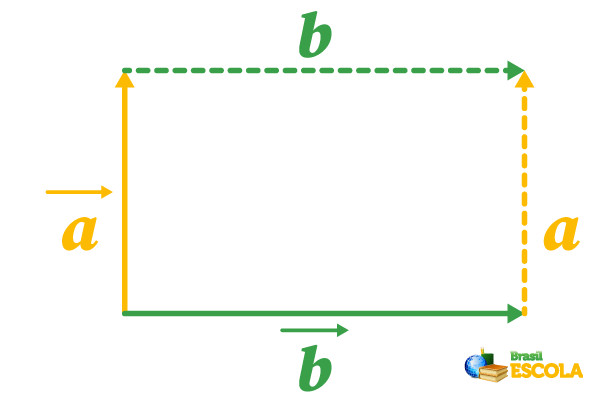
Depois, traçaremos pontilhados do mesmo tamanho dos vetores, conforme desenhado abaixo:
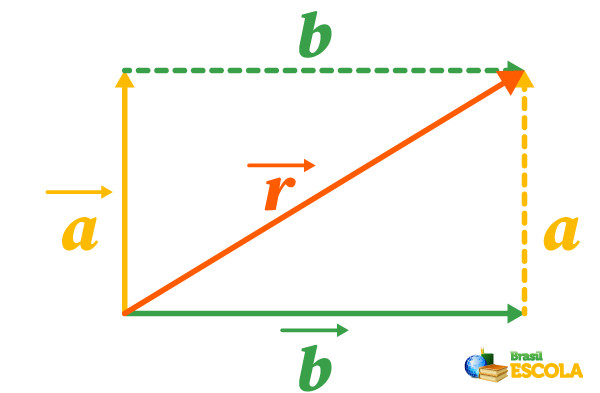
Em seguida, traçaremos uma linha diagonal, unindo a ponta da origem dos vetores até o ponto em que suas setas se encontram. Essa linha corresponde ao vetor resultante \(\vec{r}\) entre esses dois vetores, como desenhado abaixo:
Já o módulo do vetor resultante é calculado por meio do teorema de Pitágoras, dado pela fórmula:
\(hipotenusa^2=cateto_1^2+cateto_2^2\)
A hipotenusa corresponde ao módulo do vetor resultante \(\vec{r}\), e os catetos são os módulos dos vetores envolvidos:
\(r^2=a^2+b^2\)
\(r^2=3^2+5^2\)
\(r^2=9+25\)
\(r^2=34\)
\(r=\sqrt{34}\)
A direção do vetor resultante é diagonal, o sentido do vetor resultante é nordeste, e o tamanho do vetor resultante é de \(\sqrt{34}\) unidades.
Vetores oblíquos: regra do paralelogramo e lei dos cossenos
Nos vetores oblíquos, a direção e sentido são dados por meio da regra do paralelogramo e o módulo é calculado por meio da lei dos cossenos, com a sua fórmula:
\(hipotenusa^2=cateto_1^2+cateto_2^2-2\cdot cateto_1\cdot cateto_2\cdot cos \theta \)
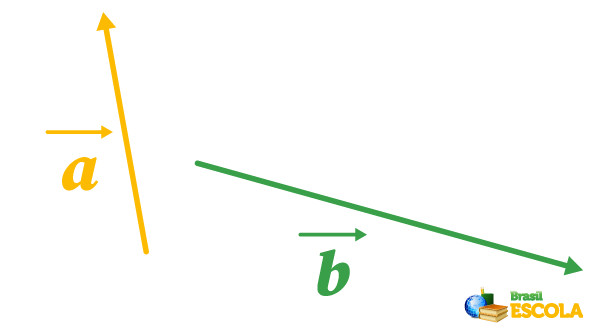
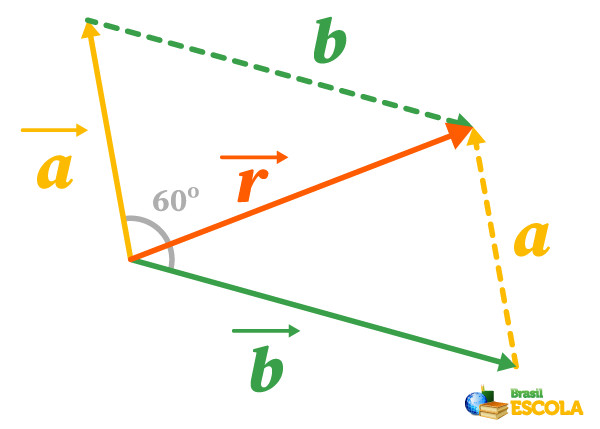
Exemplo: Determine o vetor resultante da combinação dos vetores \(\vec{a}\) e \(\vec{b}\), com tamanhos de 4 unidades e de 7 unidades, respectivamente, sabendo que o ângulo formado entre eles é 60° e suas orientações estão descritas na imagem abaixo:
Para encontrarmos sua direção e sentido, usaremos também a regra do paralelogramo, como explicada no exemplo anterior, resultando na imagem abaixo:
Já o módulo do vetor resultante é calculado por meio da lei dos cossenos, dada pela fórmula:
\(hipotenusa^2=cateto_1^2+cateto_2^2-2cateto_1\cdot cateto_2\cdot cos \theta \)
A hipotenusa corresponde ao módulo do vetor resultante \(\vec{r}\), e os catetos são os módulos dos vetores envolvidos:
\(r^2=a^2+b^2-2\cdot a\cdot b\cdot cos \theta \)
\(r^2=4^2+7^2-2\cdot 4\cdot 7\cdot cos\ 60°\)
\(r^2=16+49-56\cdot 0,5\)
\(r^2=16+49-28\)
\(r^2=37\)
\(r=\sqrt{37}\)
A direção do vetor resultante é diagonal, o sentido do vetor resultante é para a direita, e o tamanho do vetor resultante é \(\sqrt{37}\) unidades.
Vetor resultante de vários vetores
O vetor resultante de vários vetores é dado por meio da união das origens dos vetores e calculado pelo vetor resultante de dois em dois vetores, utilizando as operações de adição ou subtração, o teorema de Pitágoras ou a lei dos cossenos.
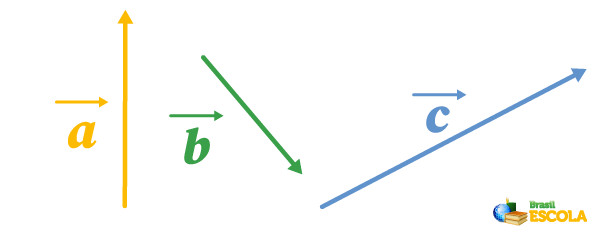
Exemplo: Determine o vetor resultante da combinação dos vetores \(\vec{a}\), \(\vec{b}\) e \(\vec{c}\), com tamanhos de 3, 4 e 5 unidades, respectivamente, sabendo que o ângulo formado entre \(\vec{a}\) e \(\vec{b}\) é de 60°, o ângulo formado entre o vetor resultante entre os vetores \(\vec{a}\) e \(\vec{b}\) com o vetor \(\vec{c}\) é de 30° e suas orientações estão descritas na imagem abaixo:
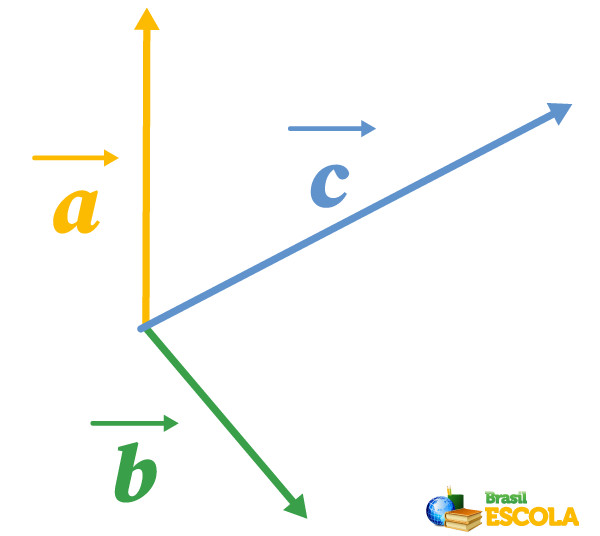
Primeiramente, vamos unir as origens dos vetores, como na imagem abaixo:
Depois, encontraremos o sentido e direção do vetor resultante entre os vetores \(\vec{a}\) e \(\vec{b}\), chamado-o de vetor \(\vec{v}\), por meio da regra do paralelogramo, como na imagem abaixo:
Já o módulo do vetor resultante\(\vec{v}\) é calculado por meio da lei dos cossenos, dada pela fórmula:
\(hipotenusa^2=cateto_1^2+cateto_2^2-2\cdot cateto_1\cdot cateto_2\cdot cos \theta \)
A hipotenusa corresponde ao módulo do vetor resultante \(\vec{v}\), e os catetos são os módulos dos vetores envolvidos:
\(v^2=a^2+b^2-2\cdot a\cdot b\cdot cos\ 60°\)
\(v^2=3^2+4^2-2\cdot 3\cdot 4\cdot 0,5\)
\(v^2=9+16-24\cdot 0,5\)
\(v^2=9+16-12\)
\(v^2=13\)
\(v=\sqrt{13}\ u\)
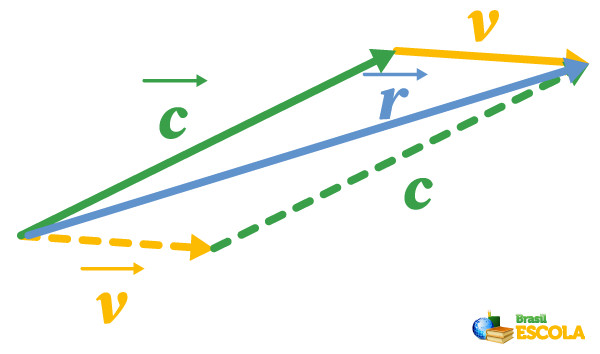
Em seguida, encontraremos o sentido e direção do vetor resultante entre os vetores \(\vec{v}\) e \(\vec{c}\), chamado-o de vetor \(\vec{r}\), por meio da regra do paralelogramo, como na imagem abaixo:
Já o módulo do vetor resultante\(\vec{r}\) é calculado por meio da lei dos cossenos, dada pela fórmula:
\(hipotenusa^2=cateto_1^2+cateto_2^2-2\cdot cateto_1\cdot cateto_2\cdot cos \theta \)
A hipotenusa corresponde ao módulo do vetor resultante \(\vec{r}\), e os catetos são os módulos dos vetores envolvidos:
\(r^2=v^2+c^2-2\cdot v\cdot c\cdot cos\ 30°\)
\(r^2=13+25-5\cdot \sqrt{39}\)
\(r^2\cong 13+25-5\cdot 6,24\)
\(r^2\cong 38-31,22\)
\(r^2\cong 6,77\)
\(r\cong 2,6\ u\)
A direção do vetor resultante é diagonal, o sentido do vetor resultante é leste-nordeste, e o tamanho do vetor resultante é de aproximadamente 2,6 unidades.
Para saber mais sobre as operações com vetores e conferir mais exemplos, clique aqui.
Decomposição vetorial
A decomposição vetorial é a fragmentação de um vetor em sua componente horizontal xe componente vertical y. O cálculo pode ser feito por meio das fórmulas abaixo:
\(a_x=a\cdot cos \theta \)
- \(a_x\) é o módulo da componente horizontal do vetor \(\vec{a}\).
- a é o módulo do vetor \(\vec{a}\).
- \(cos \theta \) é o cosseno do ângulo formado entre o vetor a e a sua componente horizontal \(\vec{a_x}\).
\(a_y=a\cdot sin \theta \)
- \(a_y \) é o módulo da componente vertical do vetor \(\vec{a}\).
- a é o módulo do vetor \(\vec{a}\).
- \(sin \theta \) é o seno do ângulo formado entre o vetor \(\vec{a}\) e a sua componente horizontal \(\vec{a_x}\).
Exemplo: Encontre e calcule a componente horizontal e a componente vertical do vetor \(\vec{a}\) com orientação nordeste e módulo de 5 unidades, sabendo que o ângulo formado entre ele e a sua componente horizontal é de 30°.
Primeiramente, desenharemos o vetor \(\vec{a}\):
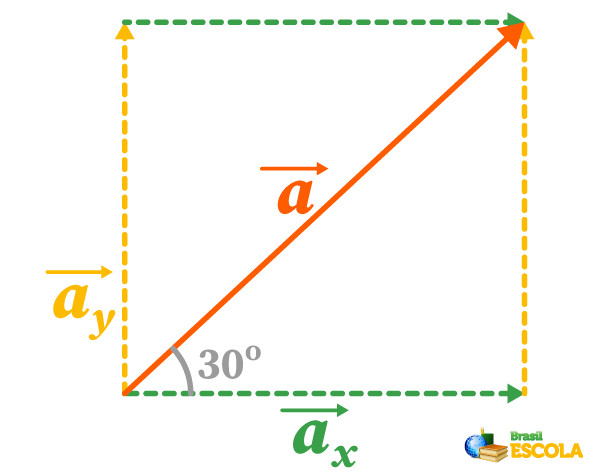
Então, vamos decompô-lo em suas componentes x e y da seguinte forma:
Depois, calcularemos a componente horizontal, por meio da sua fórmula:
\(a_x=a\cdot cos \theta \)
\(a_x=5\cdot cos\ 30°\)
\(a_x=5\cdot \frac{\sqrt{2}}2\)
\(a_x=2,5\sqrt{2}\ u\)
Por fim, calcularemos a componente vertical, por meio da sua fórmula:
\(a_y=a\cdot sin \theta \)
Exercícios resolvidos sobre decomposição vetorial
Questão 1
(UEPG-PR) Quando dizemos que a velocidade de uma bola é de 20 m/s, horizontal e para a direita, estamos definindo a velocidade como uma grandeza:
a) escalar
b) algébrica
c) linear
d) vetorial
e) n.d.a.
Resolução:
Alternativa D. Toda grandeza que necessita de orientação, além da intensidade, é chamada de grandeza vetorial.
Questão 2
(Fesp) Em um corpo estão aplicadas apenas duas forças, de intensidades 12 N e 8,0 N. Uma possível intensidade da resultante será:
a) 22 N
b) 3,0 N
c) 10 N
d) zero
e) 21 N
Resolução:
Alternativa C. Como não nos foi informada a orientação dos vetores, a intensidade do vetor resultante pode ser dada pelas operações de dois vetores. Então, primeiramente calcularemos utilizando a adição de vetores:
\(\vec{v}+\vec{u}=12+8=20\ N\)
Em seguida, calcularemos a subtração de vetores:
\(\vec{v}-\vec{u}=12-8=4\)
Depois, consideraremos os vetores como perpendiculares e os calcularemos com o teorema de Pitágoras:
\(hipotenusa^2=cateto_1^2+cateto_2^2\)
\(vetor\ resultante^2=12^2+8^2\)
\(vetor\ resultante^2=144+64\)
\(vetor\ resultante^2=208\)
\(vetor\ resultante=\sqrt{208}\)
\(vetor\ resultante\cong 14,42\)
Por fim, consideraremos os vetores como oblíquos e os calcularemos por meio da regra do paralelogramo:
\(hipotenusa^2=cateto_1^2+cateto_2^2-2\cdot cateto_1\cdot cateto_2\cdot cos \theta \)
\(vetor\ resultante^2=12^2+8^2-2\cdot 12\cdot 8\cdot cos \theta \)
Não temos o ângulo, mas sabemos que o menor valor e o maior valor do cosseno de um ângulo são -1 e 1, respectivamente, então realizaremos um cálculo para cada um desses valores:
Os valores possíveis de intensidade resultante são 4, 14, 42 e 20, então uma possível intensidade da resultante está entre 4 e 20, sendo 10.
Por Pâmella Raphaella Melo
Professora de Física
Escrito por: Pâmella Raphaella Melo Sou uma autora e professora que preza pela simplificação de conceitos físicos, transportando-os para o cotidiano dos estudantes e entusiastas. Sou formada em Licenciatura Plena em Física pela PUC- GO e atualmente curso Engenharia Ambiental e Sanitária pela UFG.
Gostaria de fazer a referência deste texto em um trabalho escolar ou acadêmico? Veja:
MELO, Pâmella Raphaella.
"O que são vetores?"; Brasil Escola.
Disponível em: https://brasilescola.uol.com.br/o-que-e/fisica/o-que-sao-vetores.htm. Acesso em 19 de abril
de 2024.